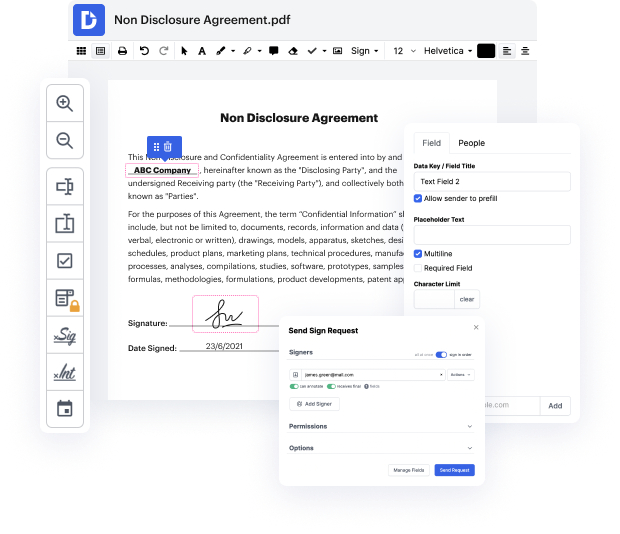
Are you having a hard time finding a trustworthy option to Coordinate Log For Free? DocHub is set up to make this or any other process built around documents more streamlined. It's straightforward to navigate, use, and make changes to the document whenever you need it. You can access the core tools for dealing with document-based workflows, like signing, importing text, etc., even with a free plan. Additionally, DocHub integrates with different Google Workspace apps as well as solutions, making file exporting and importing a breeze.
DocHub makes it easier to work on paperwork from wherever you’re. In addition, you no longer need to have to print and scan documents back and forth in order to certify them or send them for signature. All the essential tools are at your disposal! Save time and hassle by completing paperwork in just a few clicks. a go today!
This video discusses the application of the matrix exponential to integrate the angular velocity of a rotating rigid body. By considering the motion of a single coordinate axis, the final location of a vector rotating an angle theta can be determined by integrating the differential equation of motion. The vector traces out a circle around the rotation axis, with the linear velocity given by omega-hat cross p.
At DocHub, your data security is our priority. We follow HIPAA, SOC2, GDPR, and other standards, so you can work on your documents with confidence.
Learn more