La generación y aprobación de documentos son sin duda un enfoque central de cada empresa. Ya sea trabajando con grandes volúmenes de archivos o un acuerdo específico, debes mantenerte en la cima de tu productividad. Obtener una excelente plataforma en línea que aborde tus problemas más comunes de creación y aprobación de documentos podría resultar en mucho trabajo. Muchas aplicaciones en línea te ofrecen solo un conjunto limitado de funciones de edición y firma, algunas de las cuales podrían ser útiles para gestionar el formato Sxw. Una solución que maneje cualquier formato y tarea sería una opción excepcional al elegir una aplicación.
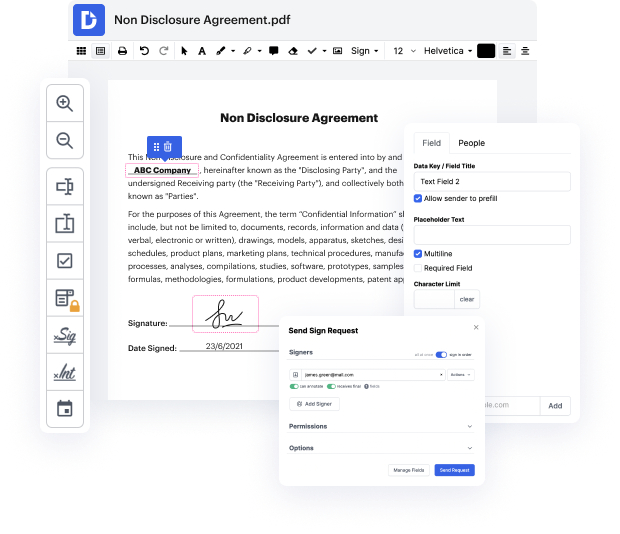
Lleva la administración y creación de archivos a otro nivel de simplicidad y excelencia sin elegir una interfaz engorrosa o opciones de suscripción costosas. DocHub te ofrece herramientas y características para manejar de manera eficiente todos los tipos de archivos, incluyendo Sxw, y realizar tareas de cualquier complejidad. Modifica, organiza y crea formularios rellenables reutilizables sin esfuerzo. Obtén completa libertad y flexibilidad para unir identificación en Sxw en cualquier momento y almacena de forma segura todos tus archivos completos en tu perfil de usuario o en una de las varias aplicaciones de almacenamiento en la nube integradas posibles.
DocHub ofrece edición sin pérdida, recolección de firmas y administración de Sxw a un nivel profesional. No tienes que pasar por tutoriales tediosos y gastar horas y horas descubriendo la plataforma. Haz que la edición segura de archivos de primer nivel sea un proceso estándar para tus flujos de trabajo diarios.
hola, mi nombre es el maestro polar y el objetivo de este video es ayudarte a identificar enlaces y uniones en manipuladores robóticos en serie. así que, para hacer eso, he preparado tres demostraciones simples basadas en el robot I RB 140 de ABB, el robot ur3 y también un robot aterrador. estos son modelos que están disponibles en v-ray, pero los he modificado y adaptado para que puedas o se pueda usar para este propósito, para identificar enlaces y juntas. está bien, pero empecemos con este robot. así que tenemos la base del robot, que es el enlace fijo, su nombre es enlace cero, y luego tenemos esta junta aquí, es una junta vertical, como puedes ver, que se encargará de mover este primer enlace móvil, que es el enlace uno, está pintado de rojo. y luego tenemos la junta dos, que es esa de allí, es un motor que es horizontal, quiero decir, el eje es horizontal y se encarga de mover este segundo enlace aquí, el coloreado en verde. y luego tenemos la junta tres, que es esa de allí, y se moverá esta junta, lo siento, este enlace aquí.
En DocHub, la seguridad de tus datos es nuestra prioridad. Seguimos HIPAA, SOC2, GDPR y otros estándares, para que puedas trabajar en tus documentos con confianza.
Aprende más